MACPOLO
 Multisensor-based ACtive Perception and mObile grasping in assisted Living envirOnments with a HSR robot
Multisensor-based ACtive Perception and mObile grasping in assisted Living envirOnments with a HSR robot
About
MACPOLO is a Toyota Partner Robot joint research project between Toyota Motor Corporation and the University of Technology of Belfort-Montbéliard (UTBM). The project focuses on the development of active perception methods for human-aware navigation on the one hand and object grasping based on mobile manipulators on the other. The entire research will particularly based on the context of health and social care services for the disabled and elderly people. Moreover, the lifelong learning methods will be investigated throughout the project, since such learning ability is expected to play a crucial role in long-term robot autonomy in everyday environments. In particular, we will exploit data acquired by sensors both mounted on the robot and in the environment in which it is deployed, where the heterogeneous nature of the sensory data will allow mutual enrichment of models for human detection, tracking and prediction. The developed methods could also be served for semantic mapping and robot localization.
Together with the project, we have also established a team composed of undergraduates, engineers and researchers, aiming to participate in various robotic competitions. For more information, please refer to: https://epan-utbm.github.io/epaner/.
Team
 |
 |
 |
 |
 |
|---|---|---|---|---|
| Zhi Yan (PI) Assistant Professor |
Li Sun (Co-I) Assistant Professor |
Yassine Ruichek Professor |
Nathan Crombez Assistant Professor |
Jocelyn Buisson Research Engineer |
Publications
| [1] Tomas Vintr, Zhi Yan, Kerem Eyisoy, Filip Kubis, Jan Blaha, Jiri Ulrich, Chittaranjan S. Swaminathan, Sergi Molina, Tomasz P. Kucner, Martin Magnusson, Grzegorz Cielniak, Jan Faigl, Tom Duckett, Achim J. Lilienthal, and Tomas Krajnik. Natural criteria for comparison of pedestrian flow forecasting models. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Online, October 2020. | 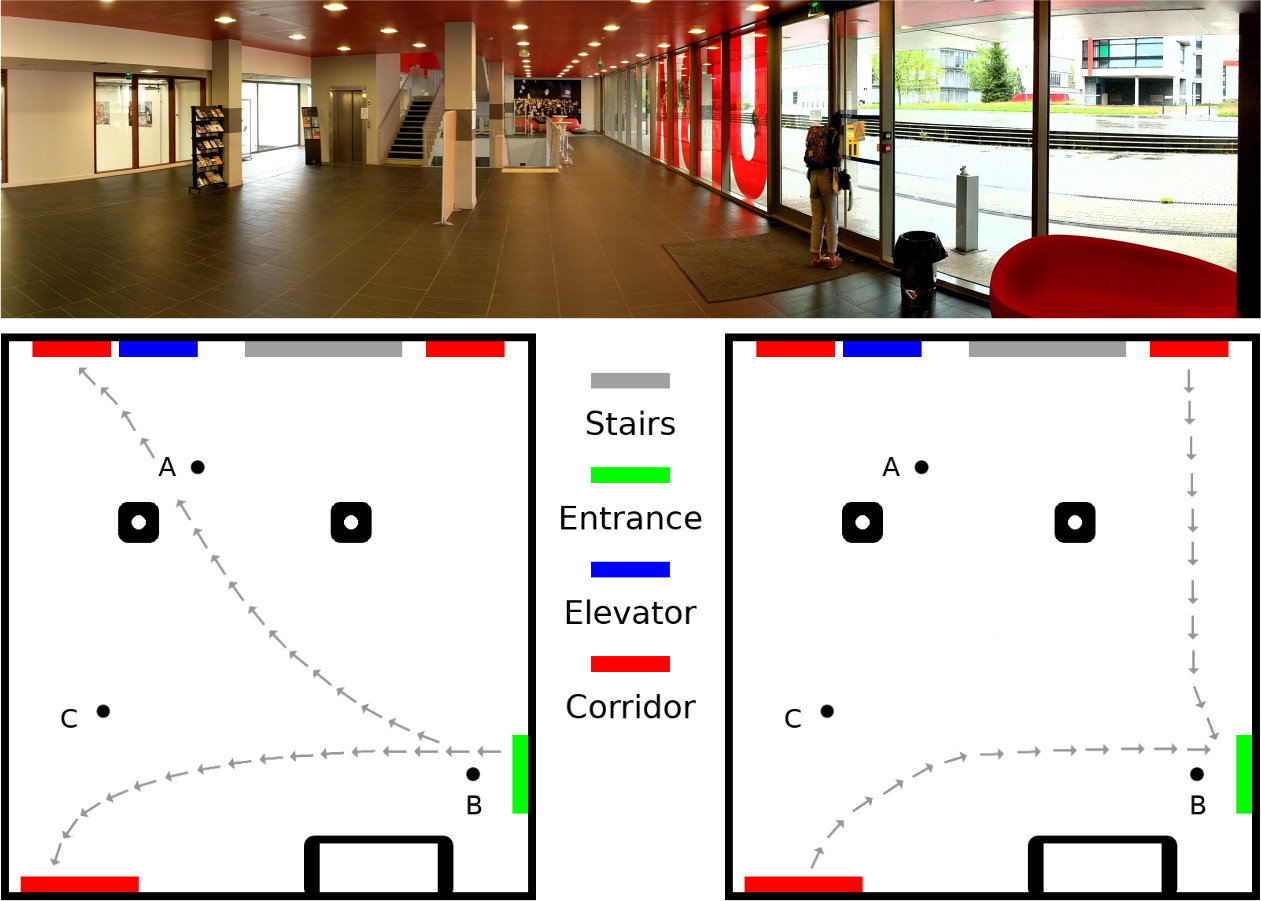 |
| [2] Nathan Crombez, Jocelyn Buisson, Zhi Yan, and Yassine Ruichek. Subsequent keyframe generation for visual servoing. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, May 2021. | 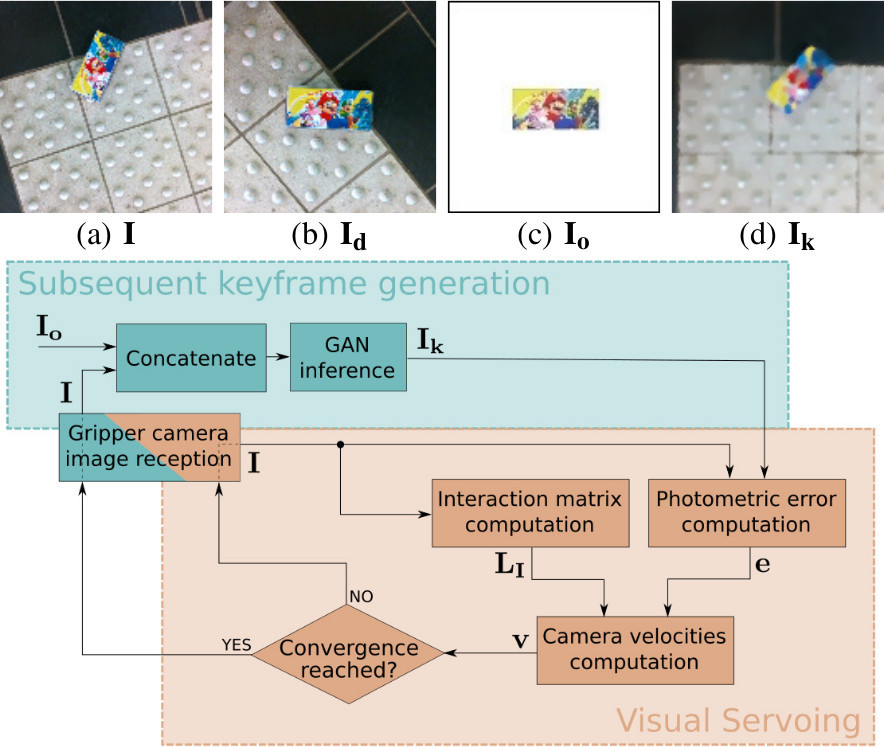 video video |
| [3] Zhi Yan, Nathan Crombez, Jocelyn Buisson, Yassine Ruichek, Tomas Krajnik, and Li Sun. A quantifiable stratification strategy for tidy-up in service robotics. In Proceedings of the 2021 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO), Online, July 2021. |  video video |
| [4] Cheng Zhao, Li Sun, Tomas Krajnik, Tom Duckett, and Zhi Yan. Monocular teach-and-repeat navigation using a deep steering network with scale estimation. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Online, September 2021. | 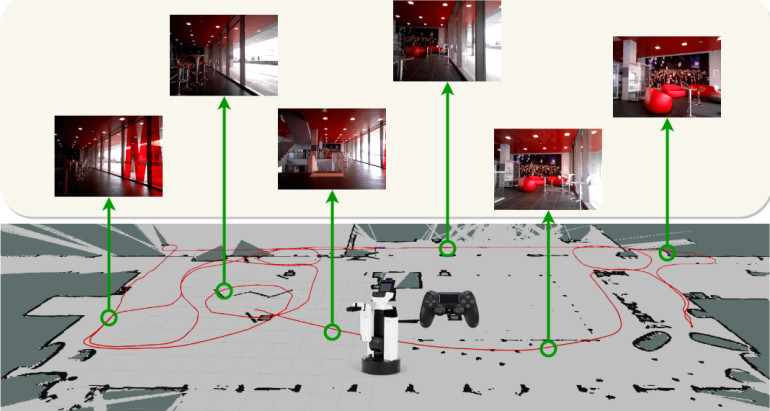 video video |
| [5] Tomas Vintr, Jan Blaha, Martin Rektoris, Jiri Ulrich, Tomas Roucek, George Broughton, Zhi Yan, and Tomas Krajnik. Toward benchmarking of long-term spatio-temporal maps of pedestrian flows for human-aware navigation. Frontiers in Robotics and AI, May 2022. | 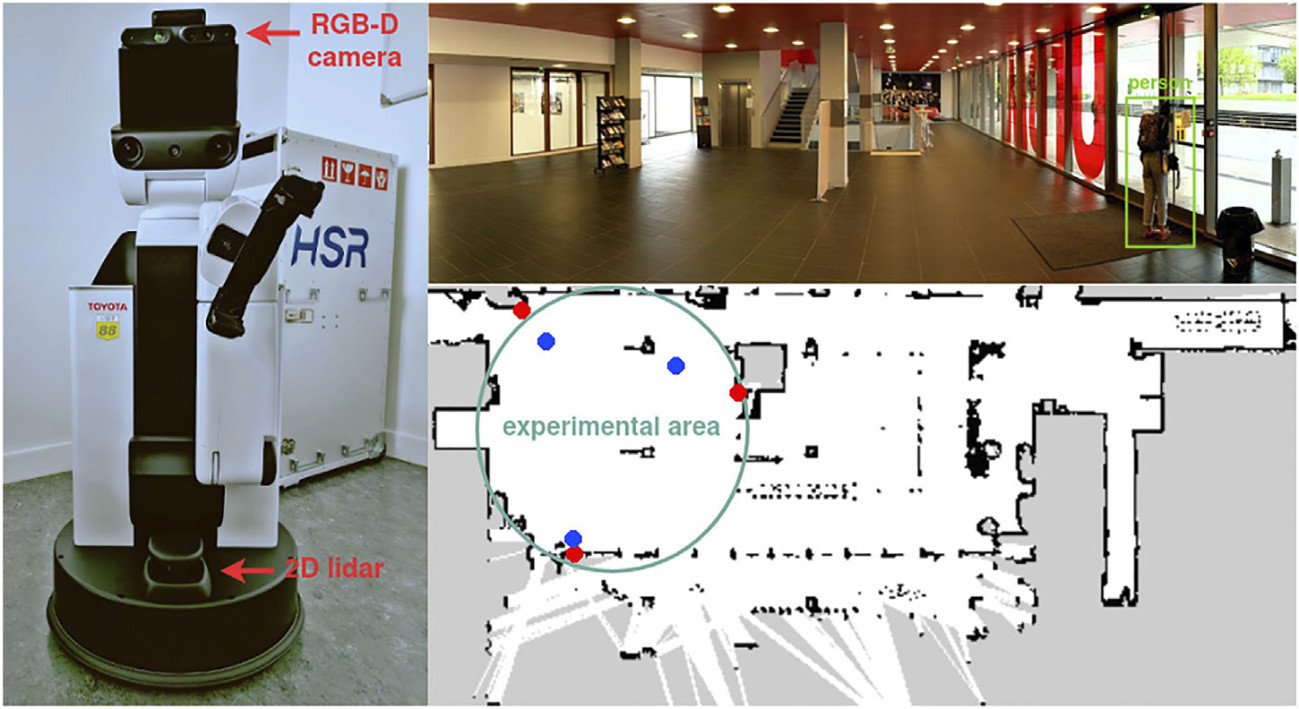 |
Toyota Partner Robot joint research project, 2018-2022 (3.5 years).
![]()
![]()