




| Biography Projects Publications Research Supervision Teaching Industry |
|
Zhi Yan, SMIEEETeacher-researcherUnité d'Informatique et d'Ingénierie des Systèmes (U2IS)École Nationale Supérieure de Techniques Avancées (ENSTA) Institut Polytechnique de Paris (concatenate 'string "zhi" "." "yan" "@" "ensta" "." "fr") All the world's a machine, And all the men and women merely models. |

|
I am currently a teacher-researcher at ENSTA. From 2017 to 2024, I was an Assistant Professor (Maître de conférences) of Computer Science and a Referent for Open Science at the University of Technology of Belfort-Montbéliard (UTBM). From 2016 to 2017, I was a Postdoctoral Research Fellow in the Lincoln Centre for Autonomous Systems (L-CAS) at the University of Lincoln, mainly working on the Horizon 2020 project FLOBOT, but also involved in the Horizon 2020 project ENRICHME. From 2013 to 2015, I was a Postdoctoral Research Fellow in Software Engineering for Mobile Robotics in the CAR Team at the École des Mines de Douai. I received my DEUG, B.Sc. M.Sc. and Ph.D. degrees in Computer Science from the Paris 8 University in 2005, 2006, 2008 and 2012 respectively, and my Habilitation degree in Computer Science, Data, and AI from the Institut Polytechnique de Paris in 2025. I have been a visiting scholar at TU Wien, CTU, Hunan University, and Central South University. My current research focuses on Robot Perception and Learning (for human-aware navigation and long-term autonomy).
In 2021, I set up a robotics course at UTBM entitled Introduction to Mobile Robotics, which is now taught at Institut Polytechnique de Paris with deep ROS 2 integration. Teaching-by-project and teaching-by-competition used to be my frequently used teaching methods.
I have served as a Reviewer for IEEE/RSJ IROS since 2014 and as an Associate Editor since 2020. I have also served as a Reviewer for IEEE ICRA since 2018 and as an Associate Editor since 2025.
I am a member of the ORIon-UTBMan Team, the founding leader of the EPANer Robotics Team, and a former member of the L3M Robot Soccer Team.
I am a member (chair for Major & Junior Simulation Leagues) of the Organizing Committee for RoboCup 2023.
I am a supporter of the Paris Call on Research Assessment.
My Erdös number is at most 5 (Richard J. Nowakowski → Tristan Cazenave → Nicolas Jouandeau).
Active
| [9] | FARMAR: Farmer-in-the-loop heritage-aware AI and Robotic Mechanisation for Agricultural Resilience. Principal-Investigator, Horizon Europe MSCA programme, €115 230, 2026-2030. |
| [8] | NavWare: Safe Worker-collaborative Navigation for Robotic Intralogistics in Infrastructure-free Warehouses. Coordinator, French National Research Agency (ANR), Programme Jeunes Chercheuses et Jeunes Chercheurs (JCJC), €238 913, 2024-2028. |
Past
| [7] | 3L4AR: Life-Long Learning of environmental dynamics for socially-aware navigation of Autonomous Robots. Principal-Investigator, PHC Barrande (UTBM-CTU mobility project), €6 600, 2023-2024. |
| [6] | LOST-CoRoNa: Learning rObust large-Scale human detection, Tracking, and prediction for socially-Compliant Robot Navigation. Principal-Investigator, Bourgogne-Franche-Comté regional research fund, €130 000, 2021-2024. |
| [5] | MACPOLO: Multisensor-based ACtive Perception and mObile grasping in assisted Living envirOnments with a HSR robot. Principal-Investigator, Toyota Partner Robot joint research project, a HSR robot from Toyota and ¥2 400 000 from WRS, 2018-2022. |
| [4] | DENOSAU: point cloud DENOising in adverSe weather conditions for AUtonomous driving. Principal-Investigator, UTBM-Renault joint research project, €60 000, 2019. |
| [3] | 3L4AV: Lifelong learning of dynamic objects detection and tracking in adverse conditions for autonomous vehicles. Principal-Investigator, PHC Barrande (UTBM-CTU mobility project), €5 000, 2018-2019. |
| [2] | Lifelong learning for accurate perception and localization of autonomous vehicles. Principal-Investigator, UTBM Research Quality Bonus, €4 600, 2017-2018. |
| [1] | Human visual information transmission modeling and its application in computer-aided diagnosis system of eye diseases. Co-Investigator, PHC Xu Guangqi (UP8-CSU mobility project), €10 000, 2012-2013. |
For a more comprehensive list see my Google Scholar and DBLP.
Book
| [1] | Zhi Yan. Robot perception and learning - A human-aware navigation and long-term autonomy perspective. Springer Nature, 2025. [bibtex | paper] |
Chapters in book
| [1] | Nicola Bellotto, Serhan Cosar, and Zhi Yan. Human detection and tracking. In Marcelo Ang, Oussama Khatib, and Bruno Siciliano, editors, Encyclopedia of Robotics, May 2018. [bibtex | paper] |
Refereed journal articles
| [8] | Iaroslav Okunevich, Alexandre Lombard, Tomas Krajnik, Yassine Ruichek, and Zhi Yan. Online context learning for socially compliant navigation. IEEE Robotics and Automation Letters, March 2025. [bibtex | paper | code | video] |
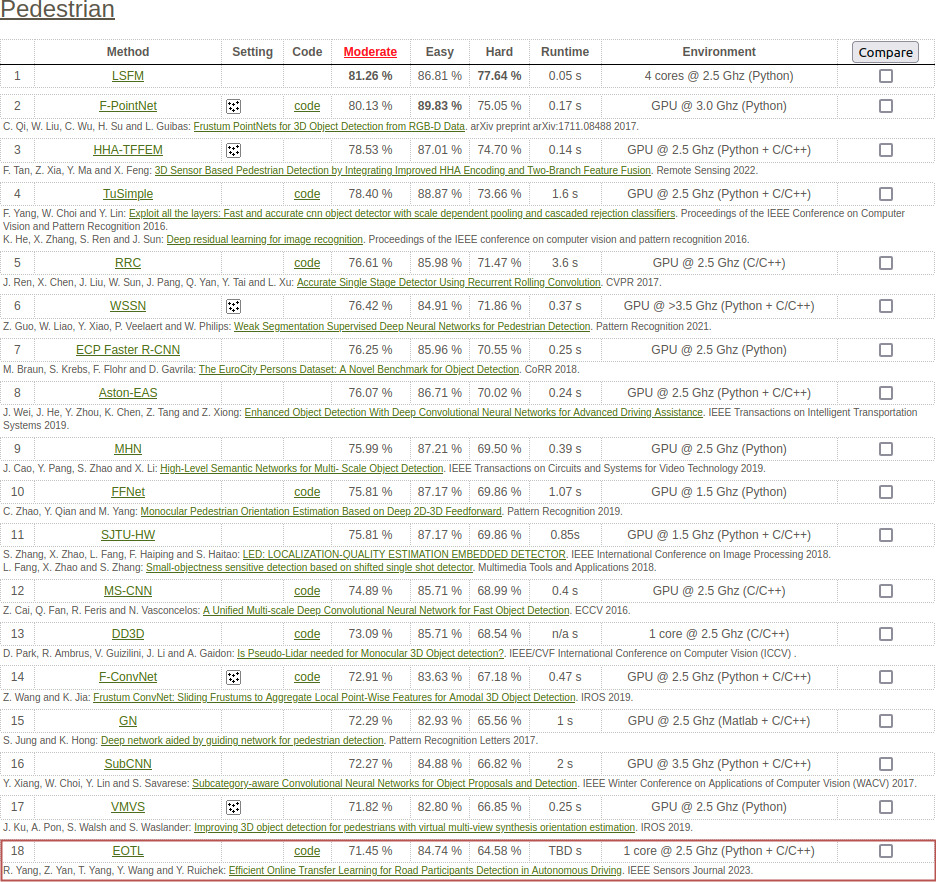
| [7] | Rui Yang, Zhi Yan, Tao Yang, Yaonan Wang, and Yassine Ruichek. Efficient online transfer learning for road participants detection in autonomous driving. IEEE Sensors Journal, August 2023. [bibtex | paper | code | video | benchmarking] |
| [6] | Tao Yang, You Li, Yassine Ruichek, and Zhi Yan. Performance modeling a near-infrared ToF LiDAR under fog: A data-driven approach. IEEE Transactions on Intelligent Transportation Systems, August 2021. [bibtex | paper | code] |
| [5] | Zhi Yan*, Simon Schreiberhuber*, Georg Halmetschlager, Tom Duckett, Markus Vincze, and Nicola Bellotto. Robot perception of static and dynamic objects with an autonomous floor scrubber. Intelligent Service Robotics, 13(3):403-417, June 2020. Best Paper Award. [bibtex | paper | dataset] |
| [4] | Zhi Yan, Tom Duckett, and Nicola Bellotto. Online learning for 3D LiDAR-based human detection: Experimental analysis of point cloud clustering and classification methods. Autonomous Robots, 44(2):147-164, August 2019. [bibtex | paper] |
| [3] | Li Sun, Zhi Yan, Anestis Zaganidis, Cheng Zhao, and Tom Duckett. Recurrent-OctoMap: Learning state-based map refinement for long-term semantic mapping with 3-D-lidar data. IEEE Robotics and Automation Letters, 3(4):3749-3756, July 2018. [bibtex | paper | video] |
| [2] | Zhi Yan, Luc Fabresse, Jannik Laval, and Noury Bouraqadi. Building a ROS-based testbed for realistic multi-robot simulation: Taking the exploration as an example. Robotics, 6(3):1-21, September 2017. [bibtex | paper | code | video1 | video2] |
| [1] | Zhi Yan, Nicolas Jouandeau, and Arab Ali Cherif. A survey and analysis of multi-robot coordination. International Journal of Advanced Robotic Systems, 10(399):1-18, December 2013. ESI Top 1% Highly Cited Paper. [bibtex | paper] |
Refereed conference papers
| [10] | Rui Yang, Tao Yang, Zhi Yan, Tomas Krajnik, and Yassine Ruichek. Preventing catastrophic forgetting in continuous online learning for autonomous driving. In Proceedings of the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi ,UAE, October 2024. [bibtex | paper | code] |
| [9] | Tao Yang, You Li, Yassine Ruichek, and Zhi Yan. LaNoising: A data-driven approach for 903nm ToF LiDAR performance modeling under fog. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, USA, October 2020. [bibtex | paper | code | video] |
| [8] | Zhi Yan, Li Sun, Tomas Krajnik, and Yassine Ruichek. EU long-term dataset with multiple sensors for autonomous driving. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, USA, October 2020. [bibtex | paper | dataset | video] |
| [7] | Tomas Vintr, Zhi Yan, Tom Duckett, and Tomas Krajnik. Spatio-temporal representation for long-term anticipation of human presence in service robotics. In Proceedings of the 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, Canada, May 2019. [bibtex | paper] |
| [6] | Zhi Yan, Li Sun, Tom Duckett, and Nicola Bellotto. Multisensor online transfer learning for 3D LiDAR-based human detection with a mobile robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, October 2018. [bibtex | paper | code | dataset] |
| [5] | Serhan Cosar, Zhi Yan, Tryphon Lambrou, Shigang Yue, and Nicola Bellotto. Thermal camera based physiological monitoring with an assistive robot. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, USA, July 2018. [bibtex | paper | code | dataset | video] |
| [4] | Li Sun, Zhi Yan, Sergi Molina Mellado, Marc Hanheide, and Tom Duckett. 3DOF pedestrian trajectory prediction learned from long-term autonomous mobile robot deployment data. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, May 2018. [bibtex | paper | dataset | video] |
| [3] | Zhi Yan, Tom Duckett, and Nicola Bellotto. Online learning for human classification in 3D LiDAR-based tracking. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 864-871, Vancouver, Canada, September 2017. [bibtex | paper | code | dataset | video1 | video2] |
| [2] | Zhi Yan, Luc Fabresse, Jannik Laval, and Noury Bouraqadi. Metrics for performance benchmarking of multi-robot exploration. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 3407-3414, Hamburg, Germany, September 2015. [bibtex | paper | video] |
| [1] | Zhi Yan, Nicolas Jouandeau, and Arab Ali Cherif. Multi-robot heuristic goods transportation. In Proceedings of the 6th IEEE International Conference on Intelligent Systems (IS), pages 409-414, Sofia, Bulgaria, September 2012. [bibtex | paper | video] |
Thesis
| [2] | Zhi Yan. Robot perception and learning - A human-aware navigation and long-term autonomy perspective. Habilitation thesis, Institut Polytechnique de Paris, June 2025. [bibtex | thesis] |
| [1] | Zhi Yan. Contributions à la coordination de tâches et de mouvements pour un système multi-robots. PhD thesis, Paris 8 University, December 2012. [bibtex | thesis | template] |
Notice for IEEE-copyrighted material: Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.
Robot Perception (2015-today): multimodal fusion, human detection and tracking, active perception.
Robot Learning (2015-today): online/continual/lifelong learning, spatio-temporal modeling.
Multi-robot Systems (2009-2015) : coordination, motion and task planning, exploration, large-scale simulation.
Robots: Anki Vector, Clearpath Jackal, Unitree A1, Toyota HSR, ROBOTIS TurtleBot3, Adept Pioneer 3-AT, Robosoft robuLAB-10, Aldebaran NAO
Sensors: Velodyne VLP-16/HDL-32E, SICK LMS100/S300, HOKUYO UTM-30LX, Optris PI-450, ASUS Xtion, Bumblebee 2/XB3
For a more comprehensive list see my theses.fr.
Ongoing
| [5] | Yifei Cao. Data-driven safe worker-collaborative robot navigation. UTBM, ENSTA, co-supervised with François Brémond, 2025-2028. |
| [4] | Emirhan Bilgic. Adaptive explainable AI for human-computer interaction. Institut Polytechnique de Paris, co-supervised with Gianni Franchi and Baptiste Caramiaux, 2025-2028. |
| [3] | Duc Nguyen. PhD Track with Master's Excellence Scholarship, Institut Polytechnique de Paris, 2025-2030. |
Defended
| [2] | Iaroslav Okunevich. Online context learning for socially-compliant robot navigation. Ph.D. in Computer Science, Université Bourgogne-Franche-Comté (UBFC), 2021-2024. [thesis] |
| [1] | Rui Yang. Online continual learning for 3D detection of road participants in autonomous driving. Ph.D. in Engineering Science, Université Bourgogne-Franche-Comté (UBFC), 2019-2023. [thesis] |
Institut Polytechnique de Paris
ENSTA
University of Technology of Belfort-Montbéliard
Paris 8 University
*Current module, +Module coordinator, -Teaching in English
Choyooz is an iPhone comic reader that I developed for Extra Live (France) company in 2009. It was developed in Objective-C with Xcode and allows downloading, managing and reading various comics.

ClickShoot2009 is a 2.5D mobile game that I developed for Extra Live (France) company in 2008. It was developed in J2ME (Java 2 Platform, Micro Edition) and has two game modes including quick play and championship mode. The quick play mode allows starting a single match with two different teams, while the championship mode takes place in two phases including qualifiers and finals. 32 teams are available and different abilities of opponents were developed in this game.

Dodgeball2008 is a 3D mobile game that I developed for Extra Live (France) company in 2007. It was developed in J2ME (Java 2 Platform, Micro Edition) and has two game modes including solo and tournament mode. Eight avatars are available and different abilities of opponents were designed in this game. In order to improve the gameplay, a bonus system was devised to allow the player and the computer opponent to get special skills by throwing a ball on the moving icon appearing in the field.



|

|
{kind=link}